ABB está mejorando su familia de robots colaborativos con un nuevo cobot industrial que combina mejores medidas de seguridad colaborativas y facilidad de uso con la velocidad, robustez y precisión de un robot industrial.
Basado en el robot industrial IRB 1100 de ABB líder en su clase, que ofrece la mejor velocidad y precisión, el CRB (Collaborative Robot) 1100 SWIFTI combina una carga útil de 4 kg y un alcance de hasta 580 mm con los beneficios de un funcionamiento colaborativo seguro y facilidad de uso. Esto abrirá nuevas posibilidades para una mayor productividad en una amplia gama de aplicaciones, desde la fabricación hasta la logística permitiendo que más empresas adopten la automatización.
SWIFTI ofrece una velocidad máxima de Tool Center Point (TCP) de más de cinco metros por segundo, más de cinco veces mayor que otros cobots de su clase y comparable con los robots industriales.
Diseñado para la colaboración intermitente entre humanos y robots, SWIFTI puede moverse a alta velocidad para una máxima productividad, sin poner en peligro la seguridad cuando una persona necesita acercarse al cobot.
SWIFTI está dirigido a tareas que incluyen el montaje y el pulido, donde los operarios deben estar pre-sentes para llevar a cabo tareas como la supervisión y el reposicionamiento de piezas. Estas aplicacio-nes han utilizado tradicionalmente amplias medidas de seguridad física, como vallas, para minimizar el riesgo de que las personas entren en contacto con robots que se mueven a altas velocidades, lo que aumenta el coste y el tamaño de la instalación e interrumpe la velocidad y la productividad de la línea cuando los robots deben detenerse para que un humano pueda entrar al espacio de trabajo.
Al integrar un escáner láser de seguridad con el software de seguridad SafeMove Collaborative de ABB, SWIFTI garantiza que no se producirá el contacto entre un robot en movimiento y un ser humano, evitando así lesiones. Trabajando en conjunto, las tecnologías permiten lograr una colaboración segura sin la necesidad de vallas físicas, al garantizar que un operario no esté presente dentro del área de trabajo del robot mientras se está moviendo.
Si se detecta un operario dentro del área de trabajo de SWIFTI, los movimientos del cobot se ralentizarán automáticamente o se detendrán por completo para permitir que el operario se acerque de forma segura. A medida que el trabajador se aleja, el cobot se reiniciará automáticamente y volverá a su máxima velocidad para lograr la máxima productividad una vez que detecte que su área de trabajo está completamente despejada. Como protección adicional, SWIFTI también cuenta con una luz de estado de interacción que proporciona una indicación visual del estado del cobot cuando el operario está en el espacio de trabajo del cobot.





“Al permitir una operación colaborativa segura a velocidades más altas con su monitoreo de velocidad y separación, SWIFTI cierra la brecha entre los robots colaborativos e industriales”, dijo Andie Zhang, Global Product Manager, Robótica Colaborativa de ABB Robotics. "Al utilizar las capacidades ampliadas que ofrecen los cobots de última generación como SWIFTI, las empresas podrán transformar su productividad al automatizar procesos repetitivos, de poco valor y peligrosos, mientras dejan a los empleados libres para realizar actividades más gratificantes".
Otro aspecto del diseño colaborativo de SWIFTI es su facilidad de uso e instalación. Las zonas de trabajo seguras del robot se pueden definir mediante las herramientas de configuración rápida y fáciles de usar de SafeMove, incluido en la App Configurator de SafeMove en la unidad de ABB FlexPendant.
Cuando se trata de programar el robot, SWIFTI ofrece a los usuarios la posibilidad de elegir la programación acompañando el robot mediante un dispositivo de guiado con la mano y el nuevo software Wizard Easy Programming de ABB. Basado en simples bloques gráficos, Wizard Easy Programming facilita a los no especialistas la automatización de sus aplicaciones. Los bloques representan acciones como "moverse a la ubicación", "recoger un objeto" y "repetir movimientos", lo que hace que sea fácil e intuitivo construir una serie de procesos simples para que los realice el robot. También hay funciones para la gestión de errores, lo que permite a los programadores nóveles resolver errores como colisiones.
Al eliminar la necesidad de que los operarios aprendan lenguajes de programación complejos, estas características reducen en gran medida el tiempo, el esfuerzo y el margen de error que han disuadido a muchas empresas, especialmente a las PYMES, de invertir en automatización.
Cada instalación de cobot incluye un paquete de inicio que proporciona acceso a una línea directa de soporte y monitorización de estado y diagnóstico de ABB Ability™ durante los primeros seis meses, así como una línea de soporte técnico gratis por los primeros seis meses para tener contacto con los expertos técnicos de ABB, que ofrecen soporte en todos los segmentos de la industria.
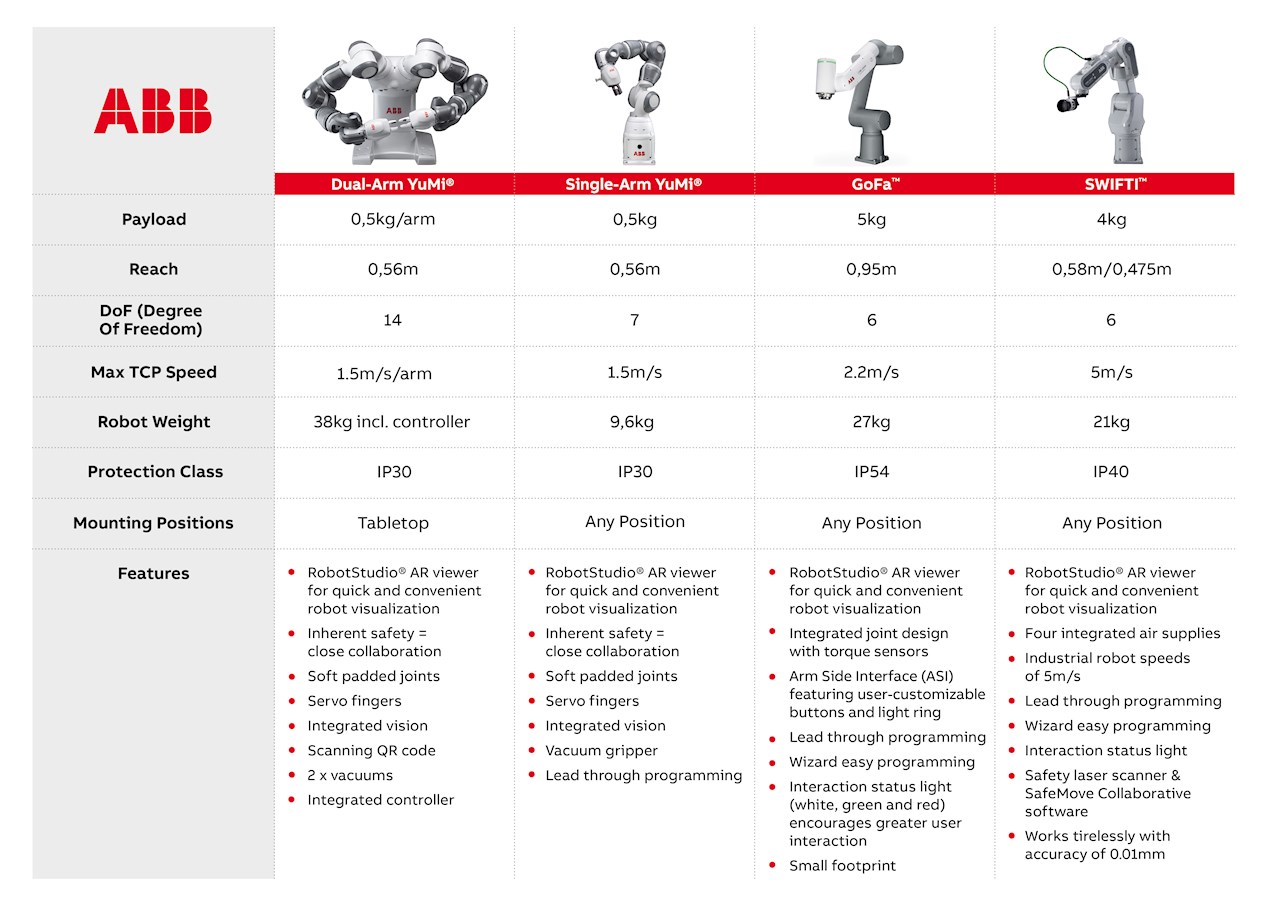
SWIFTI y el nuevo cobot GoFa ™ CRB 15000 estarán disponibles a partir del 24 de febrero de 2021, y juntos forman la última generación de cobots de ABB, uniéndose a YuMi® y Single Arm YuMi® para crear una cartera de cobots líder en la industria para aplicaciones que van desde 0,5 a 5 kg.
Características clave CRB 1100
- Carga útil de 4 kg y alcance de 475 mm o 580 mm.
- Rápido: velocidad del robot industrial de 5 metros por segund (la velocidad colaborativa exacta puede ser menor, ya que depende de la aplicación específica, herramental, capacidad de carga, etc. Los usuarios pueden recurrir al SafeMove App Configurator para una recomendación. Los usuarios deben realizar siempre un análisis de riesgo para su aplicación)
- Precisión / repetibilidad de posición de 10 micrones.
- Base reducida, manipulador ligero y permite el montaje en cualquier dirección.
- Desarrollado para el controlador OmniCore ™ y FlexPendant.
- Cuatro tomas de aire integrados.
- Brida ISO para un fácil montaje de herramientas.
- Etiqueta Cobot y esquema de color blanco / gris para diferenciar CRB 1100 e IRB 1100.
- Escáner láser de seguridad y software SafeMove Collaborative (un PLC de seguridad puede ser requerido para conectar con el escáner láser).
- Luz de estado para comunicar el estado del cobot.
- SafeMove Configurator App directamente en el ABB FlexPendant.
- Certificado de seguridad PL d Cat 3.
- Protección IP40.
- Facilidad de uso: calibración y configuración rápidas.
- Facilidad de uso: Wizard Easy Programming.
- Facilidad de uso: Dispositivo de guiado con la mano desmontable.

1. Diseño e ingeniería
SWIFTI ha sido diseñado específicamente para cerrar la brecha entre los robots colaborativos e industriales, lo que permite lograr una operación colaborativa totalmente segura en aplicaciones que exigen rendimiento industrial en términos de velocidad, precisión y robustez.
“La combinación de las capacidades de un robot colaborativo con la mayor velocidad, precisión y robustez de un robot industrial ayuda a abordar muchas de las barreras que han impedido que muchas empresas se den cuenta de los beneficios que puede aportar la automatización”, dijo Andie Zhang. “Al acoplar las características de seguridad y la facilidad de uso e instalación de un robot colaborativo con la alta velocidad, precisión, rendimiento y diseño compacto del robot industrial IRB 1100, SWIFTI ofrece lo mejor de ambos mundos. Con seguridad colaborativa y alta velocidad y precisión a la par con un robot industrial, ayudará a las empresas a transformar su productividad al permitir una mayor cooperación entre robots y humanos en una amplia gama de aplicaciones ".
Utilizando la misma plataforma que el robot industrial IRB 1100 de ABB, líder en su clase, SWIFTI proporciona la solución ideal para aplicaciones que incluyen carga y descarga o ensamblaje donde los trabajadores necesitan operar de manera intermitente en el mismo espacio de trabajo que un robot, tales como preparación de procesos, manejo de materiales y atornillado como para tareas de inserción y pulido.
SWIFTI está diseñado para funcionar con la familia de controladores de robots OmniCore de ABB. Al ofrecer altos niveles de flexibilidad, conectividad y rendimiento, OmniCore presenta una reducción del 50 por ciento en el espacio que ocupa en comparación con los controladores de robot anteriores, junto con el mejor control de movimiento y precisión de trayectoria de su clase. OmniCore se puede integrar fácilmente con las últimas tecnologías de producción digital, incluida una amplia variedad de buses de campo y sistemas de visión avanzados.
El diseño exterior de SWIFTI destaca, con el mismo esquema distintivo de color blanco y gris que los otros nuevos robots colaborativos de ABB, así como el nuevo icono representativo de robot colaborativo de ABB, que presenta una representación estilizada de un robot y una mano humana trabajando juntos.
2. Velocidad y rendimiento
Como versión colaborativa del robot industrial IRB 1100, SWIFTI ofrece la misma velocidad y repetibilidad líderes en su clase. Moviéndose hasta cinco metros por segundo, SWIFTI es cinco veces más rápido que otros robots colaborativos de carga útil de 4 kg, lo que permite a los usuarios combinar los beneficios de la operación colaborativa y una productividad mucho mayor con un solo robot.
Con una repetibilidad de 10 micras, la mejor en su clase, que supera tanto a otros cobots como a robots industriales, se puede confiar en SWIFTI para seleccionar, transferir y colocar cargas útiles con precisión una y otra vez.
Este rendimiento superior se logra mediante el concepto de separación de velocidad y seguridad que se describe a continuación, con los trabajadores humanos totalmente protegidos contra el riesgo de contacto accidental con el robot en movimiento mediante las medidas de seguridad integradas de SWIFTI.
Otro beneficio del concepto de seguridad de velocidad y separación de SWIFTI es la eliminación de la necesidad de herramientas colaborativas especializadas. Como no existe la posibilidad de contacto entre trabajadores humanos cuando SWIFTI se está moviendo, se puede utilizar con las mismas herramientas que un robot industrial IRB 1100 estándar, lo que presenta un margen para posibles ahorros de coste y elimina la necesidad de tener dos juegos de herramientas separados. Un ejemplo es la inclusión de un paquete de vacío, que cuenta con cuatro tomas de aire integrados que se pueden usar para permitir el agarre simultáneo de varios artículos mediante succión. Normalmente se utiliza en los robots industriales IRB 1100 de ABB, el mismo paquete de vacío se puede instalar en SWIFTI para ofrecer la misma funcionalidad sin necesidad de modificaciones.
3. Diseño seguro
SWIFTI combina el probado rendimiento del software de seguridad para robots SafeMove de ABB con certificación de seguridad, que está integrado directamente en el controlador cobot, con un escáner láser de seguridad, para crear un concepto de seguridad de velocidad y separación, donde el objetivo es evitar cualquier contacto entre humanos y robots, que potencialmente podría resultar en lesiones.
Esto permite una colaboración segura a velocidades y cargas útiles más altas sin la necesidad de medidas de contención como vallas. Esto hace que SWIFTI sea ideal para aplicaciones caracterizadas por la colaboración intermitente, con poco uso compartido del espacio de trabajo.
Utilizando una zona de aproximación 'verde, amarilla, roja', el robot reacciona según la zona en la que se encuentra un trabajador humano. Si se detecta al trabajador en la zona verde, el robot seguirá trabajando a toda su velocidad y rango de movimiento. Si entra en la zona amarilla, el robot restringe su movimiento y velocidad a un límite seguro. La entrada a la zona roja hará que el robot se detenga por completo, lo que permitirá al trabajador acercarse al robot de manera segura para realizar una tarea como cargar o descargar.
El robot permanecerá parado hasta que se despeje la zona roja y solo volverá al movimiento y la velocidad completos una vez que el trabajador esté nuevamente en la zona verde de seguridad.
El diseño de SWIFTI también incluye una luz de estado que permite a los usuarios ver fácilmente el estado del robot, con la luz cambiando de color de verde a amarillo y a rojo según la proximidad del usuario.
“Además de ayudar a reducir el coste total de una instalación mediante la reducción del gasto en medidas de seguridad adicionales, como vallas, la posibilidad de eliminar la separación física entre personas y robots ahorra espacio y crea espacios de trabajo más abiertos. Esto ayuda a las personas a operar y realizar sus tareas libremente, lo que minimiza las posibles interrupciones de los procesos de producción causadas por tener que detener el robot para permitir que los operadores ingresen a una célula y solucionen los problemas en caso de una incidencia”, agregó Andie Zhang.
4. Facilidad de uso
Se ha invertido todo el esfuerzo en hacer que SWIFTI sea muy fácil de usar, con las últimas tecnologías de fácil programación de ABB diseñadas para que los usuarios no necesiten aprender lenguajes de programación específicos.
Desarrollado y lanzado inicialmente en 2020 para el robot colaborativo YuMi de un solo brazo de ABB, el software Wizard Easy Programming de ABB se puede utilizar para configurar SWIFTI en cuestión de minutos. Con Wizard, el proceso de programación se reduce a simplemente arrastrar y soltar el bloque deseado en la pantalla del ABB FlexPendant, permitiendo al usuario ver los resultados inmediatamente y ajustar las acciones del cobot si es necesario. Al vincular estos bloques, se pueden crear programas completos para aplicaciones como la carga y descarga de máquinas o el ensamblaje, sin necesidad de tener conocimientos en lenguaje de programación de robots.
“Reducir el tiempo y la complejidad de la programación de robots es una de las áreas de oportunidad clave para impulsar el crecimiento de la automatización, especialmente a nivel de las PYME”, dijo Andie Zhang. “La gente se ha acostumbrado a las sencillas interfaces de usuario de los teléfonos inteligentes y otras tecnologías del día a día. Nuestra herramienta Wizard Easy Programming utiliza este concepto para reducir el esfuerzo de programar robots industriales y nos acerca significativamente más a permitir que todos puedan usar robots".
Para empresas con necesidades de programación más especializadas, también se pueden crear nuevos bloques para realizar tareas específicas. Esto se logra a través del software Skill Creator de ABB, que está disponible de forma gratuita para que cualquiera pueda convertir las rutinas de programación estándar de RAPID en bloques y dejarlas listas para que las utilicen los no programadores. Los bloques personalizados, conocidos como Skills, se pueden generar para controlar pinzas o crear acciones para aplicaciones específicas como atornillar y pulir.
Los usuarios también pueden programar SWIFTI mediante guiado manual. Un dispositivo de guiado, fácilmente desmontable, que se puede conectar a la herramienta del robot permitiendo a los usuarios mover el brazo del robot a las posiciones requeridas, que luego se pueden configurar con el FlexPendant. Una vez que se han establecido las posiciones, el dispositivo se puede quitar y reutilizar para programar otros robots SWIFTI.
Los usuarios de SWIFTI también podrán utilizar RobotStudio®, el software de programación fuera de línea y simulación de ABB. Esta es la solución basada en PC líder en la industria para programación, configuración y puesta en marcha virtual antes de la instalación.
Para ayudar a respaldar SWIFTI, ABB también ha creado una serie de tutoriales en línea que cubren una variedad de temas, desde la configuración y la programación hasta el funcionamiento y la resolución de problemas. Haga clic aquí para obtener más información.
5. Cartera de Cobots
El nuevo cobot SWIFTI se basa en el éxito de la familia YuMi de ABB, que ha ayudado a las empresas a automatizar tareas clave de forma segura desde que se lanzó YuMi, el primer robot verdaderamente colaborativo del mundo, en 2015. La cartera de robots colaborativos de ABB ahora ofrece tres familias diferentes: YuMi, GoFa y SWIFTI, con opciones de carga útil que van desde 0,5 kg hasta 5 kg, para admitir la más diversa gama de aplicaciones colaborativas.