
Bisher war die Programmierung von Roboterbewegungen eine mühsame manuelle Tätigkeit, die besondere Fähigkeiten erforderte. Die neue Funktion Automatic Path Planning in ABB RobotStudio® ändert dies nun. Das Tool reduziert die Offline-Programmierung von Roboterbewegungen auf wenige Klicks und liefert Bewegungen, die sogar von Robotikexperten erstellten Programmen in mehreren Bereichen überlegen sind. Dem Roboter wird lediglich gesagt, was zu tun ist, woraufhin dieser die Anweisungen in die für seine Fähigkeiten und die Umgebungsbedingungen optimalen Bewegungen übersetzt.
Nima Enayati, Arne Wahrburg ABB Corporate Research, Ladenburg, Germany, nima.enayati@de.abb.com, arne.wahrburg@de.abb.com; Mikael Norrlof, Mattias Björkman, Morten Akerblad ABB Robotics & Discrete Automation, Västerås, Sweden, mikael.norrlof@se.abb.com, mattias.bjorkman@se.abb.com, morten.akerblad@se.abb.com; Magnus Seger ABB Robotics & Discrete Automation, Gothenburg, Sweden, magnus.seger@se.abb.com
Als die Menschen vor vielen Jahrzehnten anfingen, beim Tanzen Roboter nachzuahmen, entsprachen die ruckartigen Bewegungen trotz aller Übertreibung dem Stand der Technik. Heute liegen solche Bewegungen und der Stand der Technik weit auseinander. Doch da die Roboterprogrammierung schwierig und zeitaufwändig ist, sind ineffiziente Roboterprogramme noch immer keine Seltenheit. Selbst erfahrene Roboterprogrammierer erstellen mitunter Programme, die nicht optimal sind. Der Grund dafür ist, dass Knickarmroboter nicht in unserer dreidimensionalen Welt, sondern in einem anderen mathematischen Raum - dem sogenannten Gelenkraum – „leben“, der typischerweise sechsdimensional ist.
Konkret bedeutet dies, dass der für Menschen kürzeste Weg zwischen zwei Punkten ganz anders ausfällt, wenn er in die für die Aktoren der Robotergelenke passende Bahn übersetzt wird. Hinzu kommt, dass eine manuelle Optimierung jeder einzelnen Roboterbewegung nicht unbedingt der besten Nutzung von Unternehmensressourcen entspricht – ein Faktor, der besonders für kleinere Unternehmen von Bedeutung ist, denen es an entsprechendem Robotikwissen fehlt. In Anbetracht dieser Tatsachen ist es an der Zeit, die Programmierung den Robotern selbst zu überlassen. Oder anders ausgedrückt, ein Nutzer sollte einem Roboter einfach sagen können, was zu tun ist, und sich nicht damit befassen müssen, wie der Roboter solche Anweisungen in einzelne Bewegungen umsetzt.
Aufgabenbezogene Bewegungen und Transferbewegungen
Ein typisches Programm für einen Industrieroboter kann in aufgabenbezogene Bewegungen und Transferbewegungen unterteilt werden. Erstere umfassen Tätigkeiten wie Schweißen, Kleben, Schleifen und Schrauben, bei denen die Roboterbahn größtenteils von der Aufgabe bestimmt wird. Bei den meisten Transferbewegungen und auch einigen aufgabenbezogenen Bewegungen (z. B. bei der Materialhandhabung) muss die Roboterbahn nicht notwendigerweise einer vorgegebenen Geometrie folgen. Wichtig für den Nutzer ist, dass sich der Roboter möglichst zeitsparend von einem Zellenbereich zum anderen bewegt. Um eine solche Transferbewegung zwischen einem Start und einem Ziel zu programmieren, definiert ein Roboterprogrammierer nacheinander mehrere Wegpunkte und prüft, ob der Roboter und seine Anbauteile der Bahn folgen können, ohne mit der Umgebung oder mit sich selbst zu kollidieren. Dabei versuchen Programmierer häufig, eine möglichst kurze Bahn zu definieren, um eine kürzere Bewegungsdauer zu erreichen. Auch müssen die Wegpunkte für den Roboter erreichbar sein. Dies mag zwar trivial klingen, doch jeder, der sich schon einmal mit der Roboterprogrammierung befasst hat, wird wahrscheinlich an einen Punkt gekommen sein, an dem der Roboter aufgrund der eingeschränkten Arbeitsbereiche seiner Gelenke oder damit verbundenen sogenannten kinematischen Singularitäten nicht in der Lage ist, der gewünschten Bahn zu folgen.
Werden Roboterzellen aus Kostengründen immer kleiner, macht dies die Programmierung kollisionsfreier, erreichbarer und effizienter Transferbewegungen immer schwieriger und zeitaufwändiger. Daher bietet die kürzlich eingeführte Funktion zur Planung kollisionsfreier Bahnen in ABB RobotStudio Programmierern die Möglichkeit, binnen Sekunden eine effiziente Bahn zu planen. Alles, was sie dazu tun müssen, ist, die Start- und Zielpositionen sowie die Robotergeschwindigkeit auszuwählen und dann auf „Erstellen“ klicken. Neben einer Reduzierung der Programmierzeit von mehreren Minuten auf wenige Sekunden bietet die daraus resultierende Bahn folgende Vorteile:
• Sie wird in ABB RAPID Move-Befehlen erstellt, was eine einfache Integration in ABB RAPID-Programme ermöglicht.
• Unabhängig von Größe und Form der Hindernisse oder der Anbauteile des Roboters ist die generierte Bahn garantiert kollisionsfrei.
• Da sie für den Gelenkraum des Roboters optimiert wurde, ist die Bahn besonders kurz.
• Da sie kurz ist, ist die Bahn auch energie-effizient.
• Sie ist garantiert erreichbar und frei von Singularitäten.
• Da die Bahn im Gelenkraum des Roboters äußerst glatt (flüssig) ist, trägt sie zu einer optimierten Bewegungsdauer, einem reduzierten Energieverbrauch und einer geringeren Belastung der mechanischen Komponenten des Roboters bei.
Letzteres wird durch die automatische Zonen-Parametrierung der kollisionsfreien Bahnplanung erreicht. Wenn ein Roboter nicht gezwungen ist, an jedem Wegpunkt anzuhalten und stattdessen eine Abkürzung nehmen kann, kann die Bewegung schneller durchlaufen werden. Solche Abkürzungen werden durch den Zonenparameter für einen bestimmten Wegpunkt definiert. Dieser gibt zum Beispiel die maximale Entfernung vor, den der Werkzeugarbeitspunkt (Tool Center Point, TCP) eines Roboters von einer im Wegpunkt definierten Position abweichen darf. Ein größerer Zonenparameter ermöglicht eine glattere und kürzere Bahn.
Häufig lässt sich nur durch Ausprobieren ein Zonenparameter finden, der groß genug ist, aber nicht zu Kollisionen führt. Dies muss dann mühsam für alle Wegpunkte durchgeführt werden. Das führt häufig dazu, dass Nutzer für alle Wegpunkte auf einer Bahn eine kleine Zone wählen, was die Performanz und Glätte der beabsichtigten Bewegung unnötigerweise einschränkt. Automatic Path Planning in ABB RobotStudio automatisiert diesen Vorgang vollständig und maximiert dabei die Anzahl und Größe kollisionsfreier Zonen auf der resultierenden Bahn. Zudem kann die Programmierung durch die Auswahl mehrerer Zielpositionen für eine Startposition weiter vereinfacht werden. In diesem Fall liefert ein einziger Klick in RobotStudio mehrere kollisionsfreie Bahnen.
Experten vs. Roboter
Auch wenn die automatische Bahnplanung zweifelsohne die Einstiegshürden für viele kleinere Unternehmen senkt und Programmierzeit spart, könnten sich potenzielle Nutzer fragen, ob eine automatisch generierte Bewegung ebenso performant ist wie Bewegungen, die von Experten programmiert werden. Um dieser Frage nachzugehen, hat ABB kürzlich eine Nutzerstudie durchgeführt [1], bei der die Performanz der von Automatic Path Planning generierten Transferbewegungen mit Bewegungen verglichen wurde, die von Roboterprogrammierern an einer realen Roboterstation erstellt wurden.
Gegenstand der Studie war eine robotergestützte Klebezelle, wie sie in der Automobilindustrie zum Einsatz kommt. Die Zelle wies ein enges Layout auf, was die Programmierung der Roboterbewegung bei gleichzeitiger Verhinderung von Kollisionen erschwert. Die Aufgabe des Roboters umfasste mehrere aufgabenbezogene Bewegungen (Aufnehmen, Absetzen, Reinigen und Kleben) und sechs Transferbewegungen. Nach Entfernung des Originalprogramms wurde die für die Studie gewählte RobotStudio-Station an drei RobotStudio-Programmierer übermittelt, die bis zu 23 Jahre Erfahrung in der Robotersimulation besaßen.
Ergebnisse
Die Experten bekamen schriftliche Anweisungen, die Transferbewegungen für die jeweiligen Start- und Zielpositionen zu programmieren. Dabei sollten sie versuchen, mit normalem Optimierungsaufwand eine gute Gesamtbewegungsdauer und einen möglichst geringen Energieverbrauch zu erreichen. Zudem sollten sie die Zeit erfassen, die sie vom Öffnen der Station in RobotStudio bis zum Abschluss der Programmierung benötigten.
→01 zeigt eine der Transferbewegungen vom Originalprogramm im Vergleich zu der von den Experten und der Bahnplanung von RobotStudio erstellten Bewegung. Die rote Linie zeigt die TCP-Bahn des Roboters. Erwartungsgemäß sind die automatisch erstellte Bahn und die Expertenbahn sichtbar kürzer als die des Originalprogramms, wobei die Bewegungsdauer beim Originalprogramm 5,95 s, beim Experten 3,48 s und bei RobotStudio 2,99 s betrug. Interessanterweise resultiert die Bahn von RobotStudio trotz des scheinbar kürzeren Wegs der Expertenbahn in einer schnelleren Bewegung. Auch die Glätte der RobotStudio-Bahn ist in der Abbildung deutlich zu erkennen.
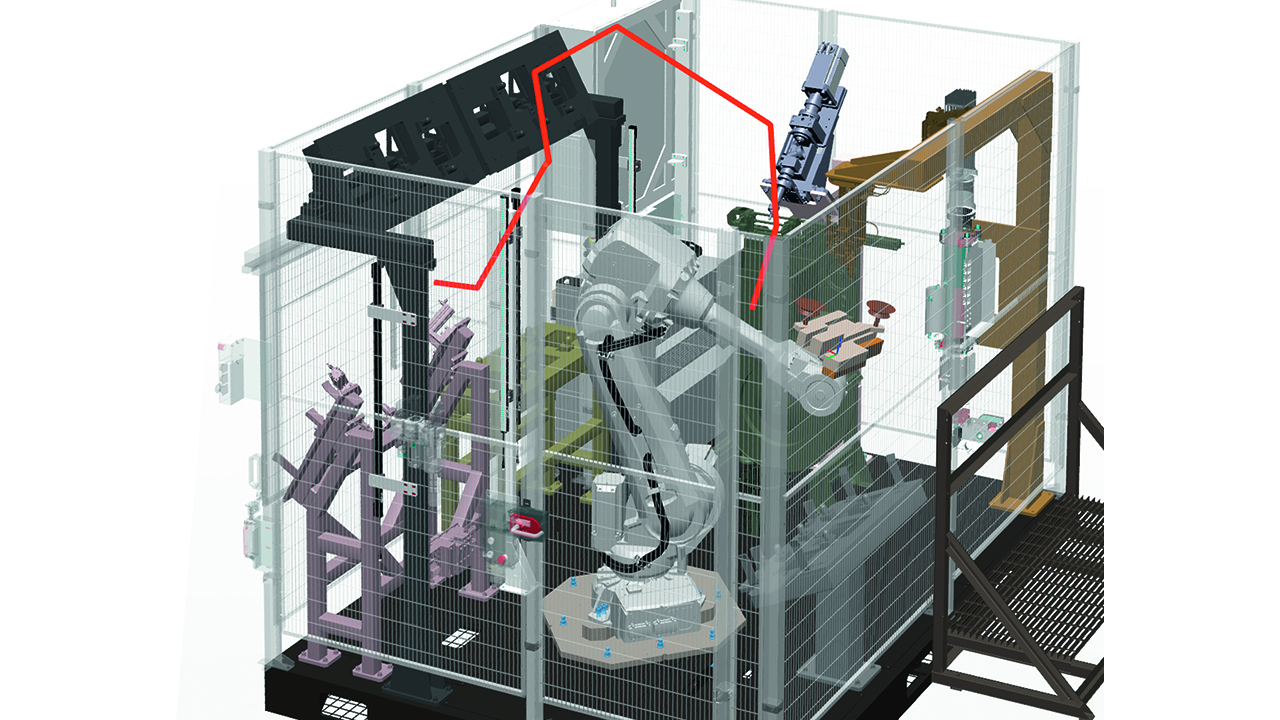
01a Originalprogramm. 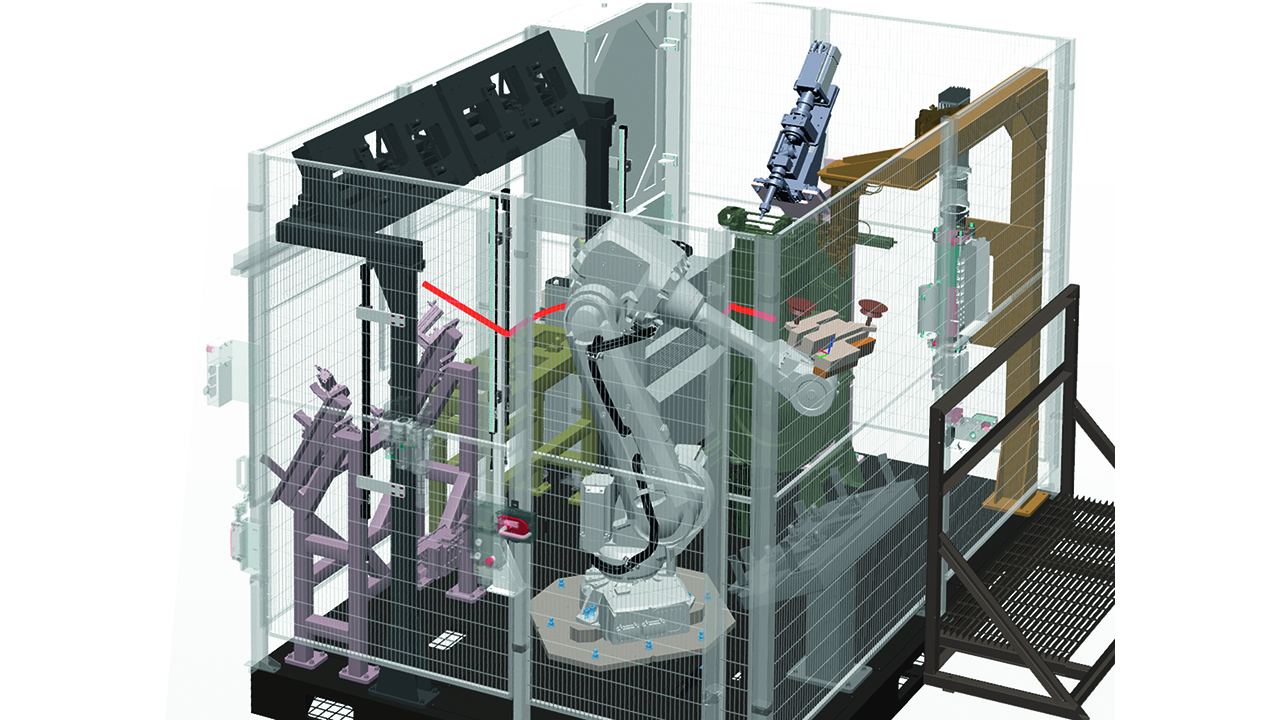
01b Planung durch Experten. 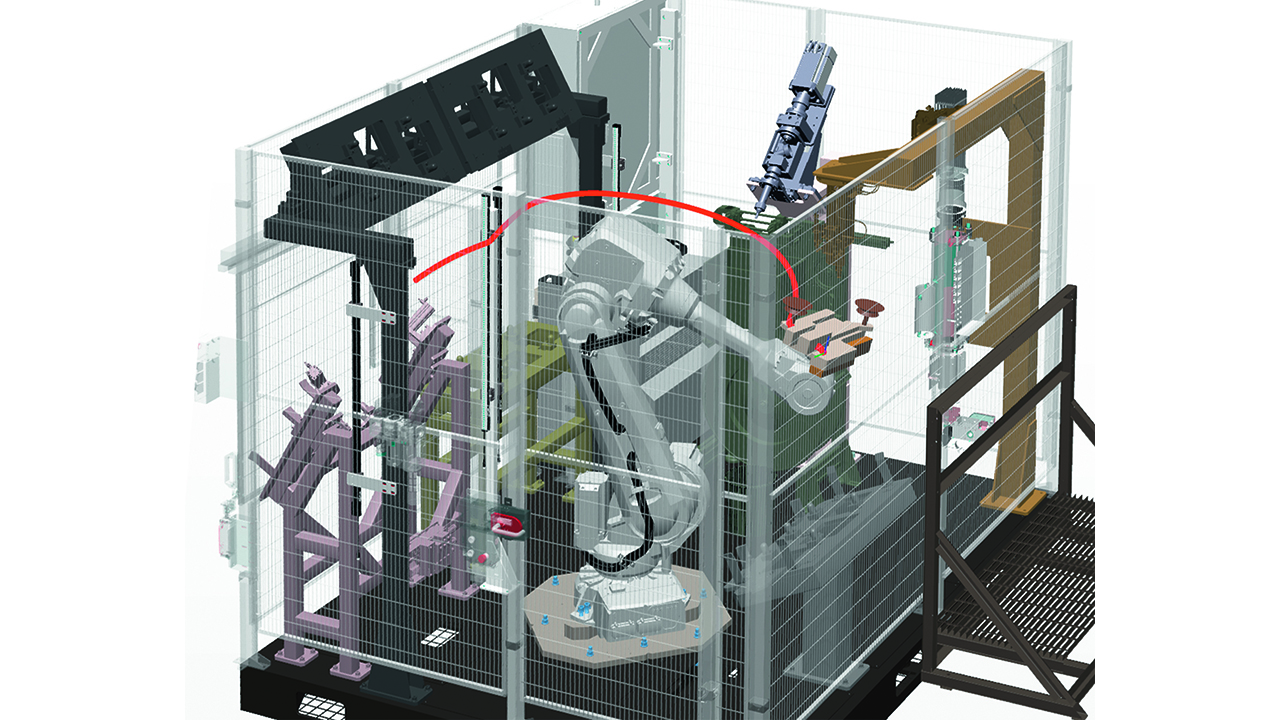
01c RobotStudio Automatic Path Planning.
01 Roboter-Transferbahnen im Vergleich. Die Bewegungsdauer beträgt 5,95 s, 3,48 s und 2,99 s.
→02 zeigt die Gesamtperformanz jedes Nutzers für alle sechs Transferbewegungen, nicht nur im Hinblick auf die Bewegungsdauer, sondern auch auf den geschätzten Energieverbrauch. Es ist deutlich zu sehen, dass RobotStudio Automatic Path Planning in beiden Kategorien besser abschneidet alle anderen Nutzer einschließlich der drei Experten. Dabei ist zu beachten, dass alle Bahnen mit dem gleichen Geschwindigkeitsparameter programmiert wurden.
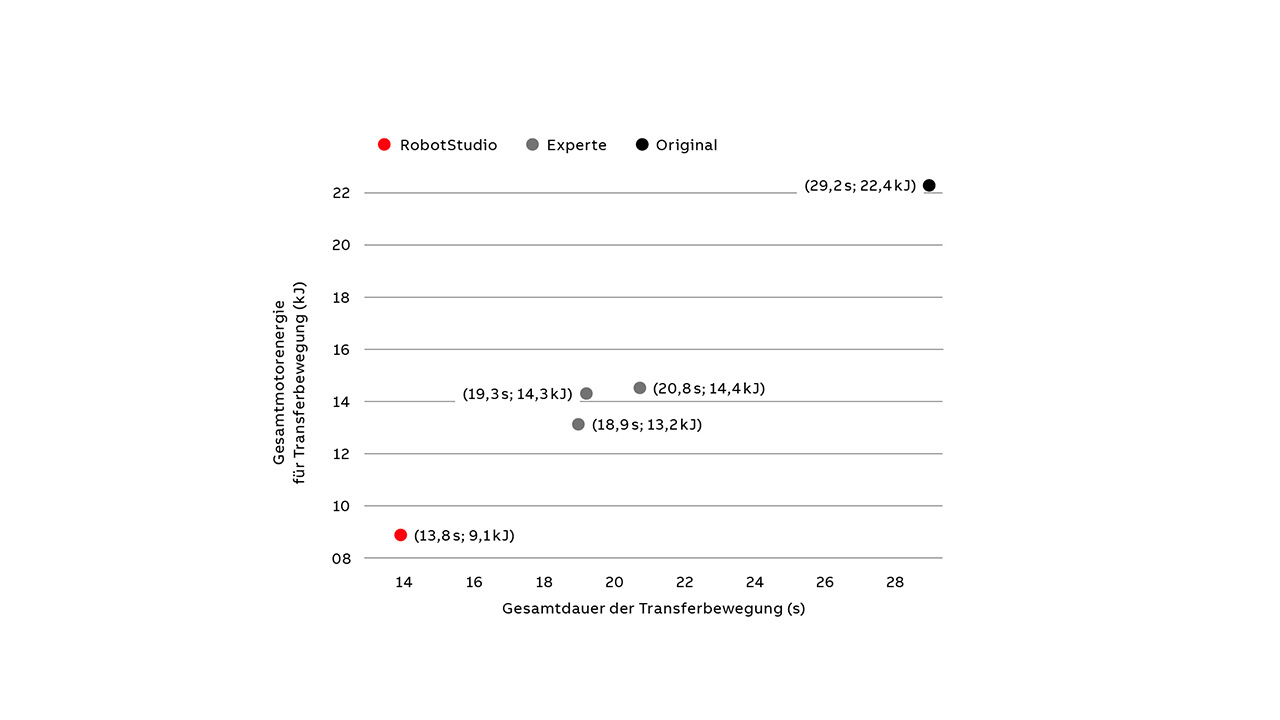
Auch wenn die Bewegungsdauer häufig die wichtigste Bemessungsgrundlage für die Performanz einer Roboteranwendung ist, gewinnt die Energieeffizienz zunehmend an Bedeutung. Doch bei einer manuellen Programmierung ist eine systematische Optimierung des bewegungsbezogenen Energieverbrauchs – besonders bei einer festen Geschwindigkeit – nicht praktikabel. Hier bieten Bewegungsplanungsalgorithmen wie die von RobotStudio einen einzigartigen Mehrwert. Natürlich könnten auch Experten eine höhere Performanz erzielen, wenn sie den Aufwand für die Optimierung eines Programms erhöhen würden. Doch wie →03 zeigt, werden die Ergebnisse dieser Bemühungen von RobotStudio Automatic Path Planning in den Schatten gestellt, mit der sich die Aufgabe in nahezu vernachlässigbaren 1,5 Minuten erledigen ließ – verglichen mit 21 Minuten für den schnellsten Experten.
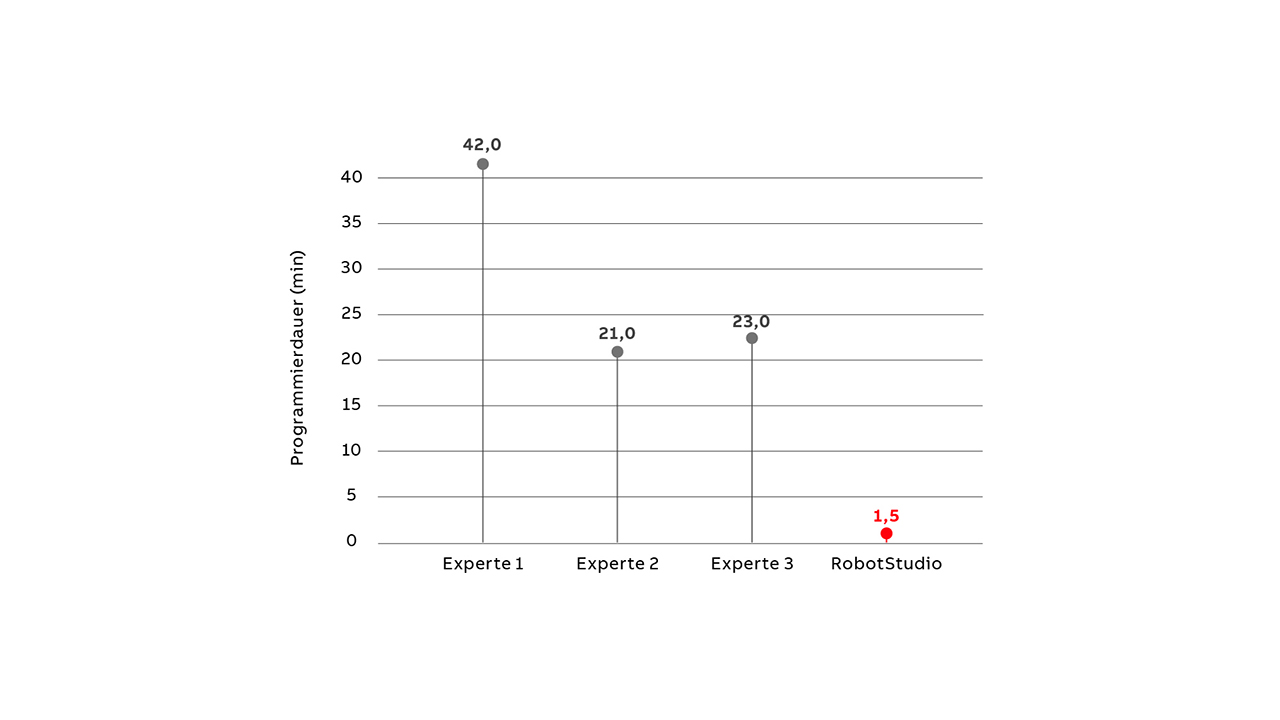
In den genannten 1,5 Minuten ist die Konvertierung der Bahn in RAPID und die Synchronisierung mit der Steuerung enthalten (die eigentliche Bahnberechnung dauert weniger als eine Sekunde pro Bahn). Somit könnten Experten bei der Programmierung von Transferbewegungen zum Beispiel generell auf RobotStudio Automatic Path Planning zurückgreifen und ihre Optimierungsbemühungen auf spezielle Fälle konzentrieren, in denen die automatische Bahnplanung zum Beispiel keine Lösung findet.

Auch wenn in diesem Artikel beispielhaft nur eine Roboterstation und einige wenige Nutzer betrachtet werden, lassen die Ergebnisse der Studie das enorme Potenzial von RobotStudio Automatic Path Planning erkennen. Mit dieser einzigartigen Lösung, die selbst Nutzern mit wenig Erfahrung die Erstellung hocheffizienter Roboterbewegungsprogramme ermöglicht, Experten erheblichen Programmierungsaufwand erspart und die mit dem Betrieb von Roboterzellen verbundenen CO₂-Emissionen reduziert →04, setzt ABB neue Maßstäbe in puncto Bewegungsperformanz, Nutzerfreundlichkeit und Autonomie in der Robotik.
Literaturhinweis
[1] ABB-interne Studie. Weitere Informationen auf Anfrage.