

Eero Lehtovaara, Head of Regulatory and Public Affairs, ABB’s Marine & Ports division 
Kalevi Tervo, Corporate Executive Engineer, ABB’s Marine & Ports division
Maritime safety has improved drastically over recent decades. However, even if navigation technology has improved, there has been no equivalent decline in the role of human error in accidents recorded. We continue to see a concerning number of high-profile accidents where human error is judged as a major contributing factor. Multiple explanations are offered in terms of leading causes: fatigue, misjudgment, poor seamanship, inadequate safety culture, excess working hours due to lack of crew, and even negligence.
Our discussions with many seafarers over the last 10 years suggest that safety is often compromised by technical failures and poor weather conditions. Over the period, it is certainly fair to say that the number of accidents linked to technical failures is on the rise because the fleet is ageing, with maintenance issues more marked as a result.
Even so, it is clear that human error continues to play a critical role in a substantial share of maritime accidents. For example, a recent study [1] analyzing collisions and groundings of container vessels during the past decade suggests that in the majority of the incidents, technical failure and adverse weather were not major contributing factors. From this, it is possible to draw the provocative conclusion that most accidents happen in good weather and when the vessel’s condition is good. How is that possible?

In general, the maritime industry takes safety very seriously. IMO regulations and associated classification society rules place emphasis on ensuring safety under prescriptive requirements for technical systems. Depending on the risk profile of the operation, the requirements may vary, but a typical requirement is that a single failure should not lead to accidents. This implies a requirement of redundancy - that is, building resilience into the system by means of e.g., parallel computers, networks, etc. to ensure that if any single component, cable, network, or other fails, the operation is still safe, even to the extent that the single failure does not have any immediate impact on the operation. Moreover, as the level of automation, digitalization and connectivity increases onboard ships, there is a growing focus on cybersecurity to fortify against cyberthreats.
The extreme care taken to ensure that technical systems are resilient and fault tolerant somewhat contradict the way the bridge operations and the chain of command are organized. The human is the only link which does not have any kind of backup. This means that if a human fails, there is no redundancy and nothing to help prevent an accident.
Let's consider an example. A normal cargo ship (Ship A) is sailing at 15 knots ahead in international waters in good weather, on autopilot with a constant RPM set by the Officer of The Watch (OOW). In accordance with the International Convention for the Safety of Life at Sea (SOLAS) requirements, the ship has mandatory navigational aids including two radars, two gyrocompasses, a magnetic compass, two Global Navigation Satellite Systems (GNSS), and two Electronic Chart Display and Information Systems (ECDIS), at least two radio communication systems, and more. Even if this ship has a single shaft, single rudder propulsion and steering, the systems have been designed so that there are backups to the control places, manual control, and segregation so that loss of propulsion does not lead to loss of steering, and vice versa. The systems have been resiliently designed to the extent that incidents due to technical failures are rare.
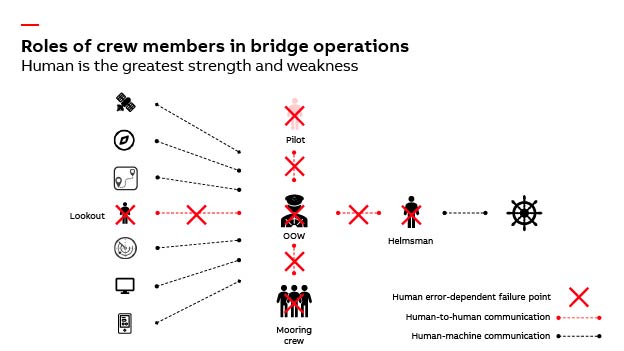
Now let’s look at the human side of the bridge operations and assume a typical two-person bridge crew configuration: an Officer of the Watch (OOW) and a lookout. The task of the lookout is to monitor navigational hazards, people / ships in distress, etc. and to convey the relevant information to the OOW. The OOW then interprets the situation, assesses the risks and makes decisions based on the information from his/her own senses, information conveyed by the lookout paired with the information from navigational aids. If the lookout fails, it is still possible that the OOW will capture the essence of the situation with his/her own senses supported by the navigational aids. On the bridge, the OOW is the only single point in the chain of command and information that has no backup whatsoever.
As illustrated in Figure 1, all human crew members supporting the bridge operation can independently fail. In addition, the human-to-human communication can independently fail. Either the person who is communicating makes a mistake, or the person who is receiving the communication misinterprets the information. All human crew members - be that lookout, OOW, pilot or even the mooring crew - can fail in their individual observations, analysis, decision-making and action tasks. For example, the lookout may make a correct observation but misinterprets the situation, in which case the analysis and the decision-making fail, and the information communicated to the OOW is flawed.
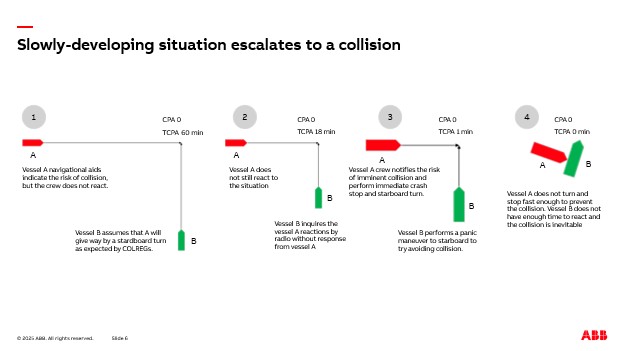
Consider the example above with the addition that there is another vessel (B) approaching vessel A from starboard with constant bearing as illustrated in Figure 2. In this situation vessel A is a give-way vessel according to the International Regulations for Preventing Collisions at Sea (COLREG), which means it is expected to take a starboard turn to avoid the collision, and B is a stand-on vessel, which is expected to maintain its course and speed during the encounter. The radar of vessel A picks up vessel B and the collision warning system in the navigation detects a collision risk but, as there is insufficient manning on board and the crew is extremely tired due to the extended working hours and very little sleep, the alarms have been muted. Vessel B decides not to inquire by radio about the intentions of vessel A at this point, because the crew onboard vessel B assumes that A will eventually act. The slowly developing situation goes unnoticed and unactioned by the crew in vessel A and therefore, the crew does not perform the give-way action until vessel B (stand-on) makes a panic maneuver and blows the horn which alerts the crew in vessel A. The crew in vessel A finally notices the situation and tries to perform a crash-stop and full starboard turn, but nothing helps and the vessels collide, causing fatalities and serious damage to the environment.
The imaginary incident described in the example above is preventable using today’s commercially available technology. The technologies for performing automated/electronic lookout by means of computer vision, fusion of radar and other nautical observations, as well as performing automatic assessment of the collision risk, calculating evasive maneuvers according to COLREGs, and automatically controlling the ship’s course and speed according to the calculated maneuver have been demonstrated on a small and large scale in various applications by various vendors. Considering the example described, and the proper application of the above-mentioned technologies, automation could have detected the danger and performed the avoidance maneuver, thereby preventing the accident. Based on our experience, typical objections to accepting such technology onboard claim that it would need to match or beat human levels of performance in all conditions before it could be considered safe. Why?
If weather is not a dominant factor in typical maritime accidents, and if the system is there to act only in case the human fails to act, is it not safer to have a system that with very high likelihood acts and avoids the collision, rather than not having such a supporting system and colliding?

What is more, the existing technology for computer vision and sensor fusion has proven to be very reliable in just those conditions where most human error-related accidents occur. As individuals we are very used to Advanced Driver Assistance Systems (ADAS) features in modern cars and accept, for example, that if there is snow and ice covering the sensors, the systems are not operational. Even so, we feel that the ADAS features increase the safety of our driving, and as drivers we understand in which conditions we can fully trust the systems, and in which conditions we should not count on them.
Like car drivers, human crew onboard vessels where automation supports navigation would still be in full control and have responsibility to act, in accordance with good seamanship. However, they would be able to act significantly earlier, when there is still time to avoid an accident. And if they did not act, and automation intervened to perform an essential evasive maneuver to prevent an accident, the crew would still retain the mandate to override the resulting actions if required.
In the big picture, considering the fatality rate per ton-nautical miles, shipping is the safest mode of transportation [2] (albeit there are regional differences worldwide) – and so it is important to acknowledge that the reliability of crew at sea is actually high. Furthermore, both humans and machines can and do fail at times. However, the likelihood that both will fail at the same time is clearly lower. And since we already have the technology to make systems that allow humans and automation to back each other up, it would be reasonable to suggest that having the regulatory allowance to use it should be beneficial for maritime safety.
Luckily, the International Maritime Organization (IMO) has increased its focus on human factors to improve the safety of maritime industry [3]. In our opinion, opportunities enabled by new technologies to support the crew in mitigating risks of collisions should be heavily emphasized as part of the work. In the current IMO hierarchy, a system that eventually decides autonomously to act in case the human fails to act, falls under the ongoing Maritime Autonomous Surface Ships (MASS) Code development.
Unfortunately, MASS is a controversial topic and the misconceptions related to the term can easily overshadow discussions about the real opportunities of the safety applications in conventional vessels – just like ADAS in cars. And there is a way to navigate around the sometimes treacherous waters where the debate on MASS or autonomous ships in general takes place. In our opinion, the fundamental question should be – “if there are technologies in the market which could prevent accidents and would mostly retain the chain of command and the role of the human crew in the conventional vessels, why do we allow ships to sail without them?”.
Today, the human crew onboard are simultaneously the greatest strength and greatest weakness in maritime safety. Human crew members prevent accidents every day by taking the right decisions and actions in challenging situations. However, the current regulated chain of command puts humans in the position of the weakest link. Therefore, we should really focus on ensuring that the human can continue to be the greatest strength in maritime safety and augment their human performance using technology. As is the case in any modern car today, our aim is not to replace the driver, but to support crews and prevent accidents when the greatest strength of the current system - the human - fails.
References:
[1] Hamann, R., & Sames, P. C. (2022). Updated and expanded casualty analysis of container vessels.Ship Technology Research,69(3), 158–169. https://doi.org/10.1080/09377255.2022.2106218
[2] Center for ports and waterways Texas A&M Transportation Institute (2022), A MODAL COMPARISON OF DOMESTIC FREIGHT TRANSPORTATION EFFECTS ON THE GENERAL PUBLIC: 2001–2019. TTI 2022 FINAL Report 2001-2019 1.pdf