Rover development team member Hiroki Furihata is a man on a mission. Speaking from JAXA headquarters at the Uchinoura Space Center in Kimotsuki in Kagoshima Prefecture, he says the countdown has begun and that if all goes according to plan, a flight model of the rover will be ready for Moon missions by 2029.

Moving humans around with maximum efficiency and optimum safety is the key to sustainable space exploration. Together JAXA and Toyota have set their sights on developing an exploration vehicle that will be able to cover an unprecedented amount of ground. The partners signed a three-year joint research agreement in 2019 that will see engineers focus on manufacturing, testing, and evaluating various prototypes.
JAXA and Toyota break new ground
Featuring a pressurized cabin and powered by fuel-cell electric vehicle technology, the JAXA/Toyota rover will be light years ahead of the “Moon buggies” used in NASA's Apollo missions in the 1970s. Range back then was restricted by a “walkback limit”, or the distance, in case of a failure, that an astronaut could safely manage on two feet to get back to the landing module.
“An open lunar buggy with extended range is great, but the crew would still have to wear space suits the whole time. It's difficult to stay suited up for any length of time, so trips would be limited to one to three days,” says Furihata. “We want to extend trips to a total of 42 days or six weeks at a time.”
One tank goes a long way
Total driving time on the initial mission is expected to total more than 10,000 kilometers (6,213 miles). “The rover will need to cover that kind of distance to locate and study interesting scientific targets. A pressurized cabin is key to achieving this,” Furihata says. Toyota’s next-generation fuel cell to enable the rover to travel up to 1,000 kilometers on one tank of hydrogen.
Both hydrogen and solar were considered as energy sources. Together with Toyota engineers, JAXA concluded that a fuel cell powertrain is the most stable option, combining high energy density with lighter weight and compact size. As the team calculated the amount of energy that would be sufficient to secure the driving range required, they found that fuel cells were the best choice, at approximately one-fifth the mass of lithium-ion batteries and about 20 percent smaller in terms of volume. This highlights the superior performance capability of fuel cells being proven right now here on Earth. On the Moon, the water produced from the generation of electricity could be reused as either a coolant or as drinking water.
Driving at night
Extensive tradeoff evaluations were conducted to identify the best sustainable power source for the rover based on the defined exploration region at the moon's south pole, and driving distances. It will operate both during the day and at night – which on the Moon last for roughly two weeks each – as well as in freezing craters that even during daylight are permanently in shadow due to the low angle of the sun. “The lunar surface is also very variable, flat in some places and pretty rugged in others. You need power to negotiate that harsh terrain,” says Furihata.
Furihata says other propulsion technologies could emerge in the future, but his view is that hydrogen will remain the best solution. “Research here on Earth is developing very rapidly. Space technology is cutting edge. Improvements in energy density and efficiency of the fuel cells will undoubtedly enable rovers to travel even greater distances.”
According to preliminary parameters, the rover will measure six meters long, 5.2 meters wide, and 3.8 meters high – roughly the size of two minivans. The 13-cubic-meter cabin will have room enough for two astronauts. “Activity outside the rover will obviously require space suits. But when inside they won't have to wear them,” says Furihata.
Auxiliary role for solar
The fuel cell will not only propel the rover, but also power all the electronic devices and human support systems on board. “We're still calculating how much energy eliminating the need for suits will require,” Furihata says.
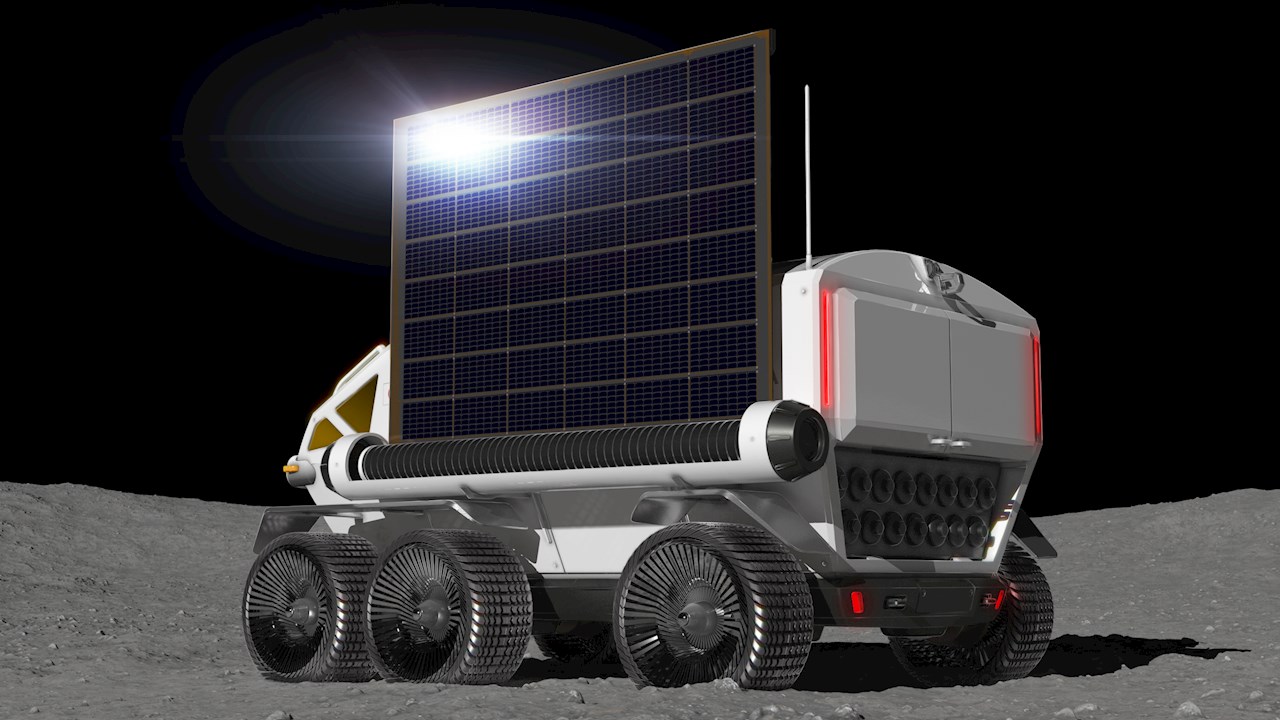
“Energy mass also clinched it for fuel cells in terms of transport. Given the significant mission energy requirement, using solar power would mean you'd have to carry all the solar photovoltaic panels with you. That's a lot of weight,” Furihata says. However, the rover will be equipped with a deployable solar cell for charging onboard batteries during daylight, so ultimately there will be a combination of both power sources.
Astronomical autonomy
The rover will have fully autonomous driving capability using a sophisticated array of sensors, cameras, and LiDar (light detection and ranging) – in line with technology already being applied in land vehicles by Toyota and others, and by engineering companies like ABB for ships. The rover will be of course be enabled for remote operation from the landing craft and/or mission control on Earth, but this is inherently risky because of the time lag in transmitting signals to and from Earth. A self-driving function is an absolute necessity.
Furihata says the current operations scenario, at least initially, will see two rovers travelling in tandem. If something happens to one, the other is there to help. However, in the event of the astronauts being disabled, the rovers will be able to return to the landing craft under their own command.
Collaborative space
The International Space Station (ISS) and lunar exploration are the challenges that will drive development in all areas, including mobility. Then the big red planet. “Mars is our ultimate goal,” said Furihata. “Moon is our gateway, a stepping stone to future exploration.”
The rover forms part of a wider international project also involving NASA. The US agency has been conducting its own infrastructure studies as part of its Artemis program, where the ultimate objective is to establish a human presence on the moon (dubbed “Gateway”) as a springboard to deeper space. It plans to have humans back on the Moon as early as 2024. The idea of manned rovers as part of the mix is not new per se. A NASA study in 1990 examined the power requirements of such a vehicle for Mars missions, but the power pack under consideration back then was an on-board nuclear reactor. “We're coordinating with NASA now and building on their experience. But we want to take it to a much more ambitious level,” Furihata said. “It has to be done sustainably.”

Strong starting lineup
Furihata says his team has seen a lot interest in the project from academia and industry in Japan. “We have Mitsubishi of course and other space-competent companies who've been involved in rocket development and the ISS. But the enthusiasm has spread to non-space enterprises, ranging from automotive components to domestic appliances. All of them have cutting-edge technologies that could theoretically be used on the rover. The interior space needs to be fitted out, so the hotel element is key.”
An enormous amount of work will have to be done before the rover´s 2029 completion date. “A decision to move forward with a full-scale prototype will be taken in spring of 2022. The next two years will be spent on acquiring and verifying data on the driving systems. The three years after that – from 2024 to 2027 – will be used to design, manufacture, and evaluate an engineering model,” Furihata says. That will be followed by design of a full-production variant with the necessary packaging to fit into a rocket. From 2027 the focus will be on performance and quality testing of the flight model.
No testing location for the rover has yet been decided. “We’ll coordinate with NASA and other international partners to determine the site. It might be elsewhere, but the baseline location is Japan,” says Furihata. It certainly promises to be an exciting project and one where Japan can demonstrate its tremendous capacity for innovation.