Capt. Eero Lehtovaara
Head of Regulatory Affairs
ABB Marine & Ports
Dr. Kalevi Tervo
Global Program Manager
ABB Marine & Ports
Abstract
The recent development in sensor technology, data analytics and computing power enables to increase the level of automation in ship navigation, steering and control. As a basic definition an autonomous vessel is not necessarily unmanned but an unmanned vessel is, by default, autonomous to a high degree.
It is also important to make a distinct and clear difference between the technical readiness and capability of the vessel versus the status of usage of the vessel at any given time. In certain conditions, the crew onboard may be given the opportunity to change vessel operation from crew to machine operated.
This paper presents a concept of B0 – conditionally and periodically unmanned bridge – which enables more efficient utilization of vessel crew, reduction in fatigue and increases safety by enabling an unmanned bridge provided that certain conditions are met. It also reviews the main tasks of the crew at the bridge and elaborates the benefits of B0 concept. A review of the regulatory background that will either require amendment or a demonstrated equivalent or better status with the appropriate use of technology to enable B0 operations. The technology requirements and implications are discussed in the last section of the paper.
The officer of the watch
A Deck Officer assigned with the duties of watch keeping and navigation on a ship’s bridge is known as the Officer of the Watch (OOW). While keeping a watch on the bridge, the OOWis the representative of the ship’s master and has the total responsibility of safe and smooth navigation of the ship. The captain of the vessel when on bridge and has assumed ’the conn’ has the status of OOW in this context.
The OOW is also in charge of the bridge team, which is there to support him or her in the navigation process. The OOW is also responsible to ensure that the ship complies with COLREGS and is operated with the utmost safety under all conditions. The main duties of the OOW can very broadly be defined as: navigation, watch keeping and radio watch.
The examples below comprise a generalized approach to the duties of the OOW on bridge. Key rules could be grouped into the following:
- Check navigational equipment in use at regular interval of time.
- Prepare, execute and monitor a safe passage plan.
- Ask for support whenever required.
- Contact the master when need arise.
- Not leave the bridge unattended during the assigned watch.
In more details the OOW will routinely perform the following actions:
The OOW must check the position for personal situational awareness and verifying (and reverifying) to ensure the best possible “mental picture” of the operation is formed. The previous positions affect the future position and therefore, in order to maintain maximum accuracy of the plot, is by necessity an iterative process. When starting or finishing the watch it is crucial that the communication when changing watches cover all relevant information. This is due to the fact that navigation of the vessel is by nature dynamic and all conditions at any given time affect the ship,
Even in the 21st Century, following the working and the reliability of the ship’s compasses is still required as is the operation of the depth sounder. This is done in order to have as precise a window within which the errors can be made good, particularly in poorly charted areas such as the Antarctic. Should a gyrocompass fail, GNSS will in most cases provide location data but will affect the autopilot if no other redundant systems are available.
Rule 5 of COLREGS puts special emphasis on lookout and states that “Every vessel shall at all times maintain a proper lookout by sight and hearing as well as by all available means appropriate in the prevailing circumstances and conditions so as to make a full appraisal of the situation and of the risk of collision.” This is further emphasized when the vessel operates in restricted visibility (Rule 19 of COLREGS) wherein the role of the lookout man is paramount.
The radio watch (GMDSS) watch is crucial to the safety of all and must be maintained on the stipulated frequencies as per regulations. Whether or not information received affects the ship immediately is not the primary task but to determine if it affects the ship.
When applicable,the OOW should ensure other members of the bridge team are alert and awake at all times. During times when the Engine Control Room is in unmanned operation, the OOW may also send another bridge team member to inspect the machinery rooms to ensure that all is well.
B0 Benefits
Although the number of crew, especially in oceangoing cargo vessels, has decreased during the last decades, at least one person on the bridge is required regardless of the conditions. While this is very much justified in situations where the ship is approaching other ships or areas where more traffic is anticipated, crossing an ocean in very good and clear conditions can lead to a situation where the OOW is on the bridge for the entire work shift without touching any equipment or doing anything but looking at radar screens and outside the window making sure that there is nothing out there. This can cause mental fatigue with an associated loss of alertness and can lead to a situation where a human reacts too late to an event which could have been anticipated significantly earlier if the OOW would have been more alert during the situation.
Enabling a better quality of rest during good conditions when there is no need for major navigation actions has an impact on crew alertness and decreased fatigue when approaching coastal areas or routes which have traffic. The B0 concept enables the crew to use the time during the work shift more freely to tasks which will keep them more alert and increase the wellbeing at work. Moreover, at least for the majority of the crew, the working hours during the ocean crossing voyage could be closer to normal office hours. Together, this will most likely increase the safety of navigation in areas where manned bridges would be required.
We believe that when notified of an upcoming navigational danger, the bridge team will be more alert than when the situation is slowly building up over time.
The regulatory framework
In general, the legal instruments applying to the maritime industry are a range of laws and conventions, both international and national, that govern the ships and their related operations. The majority of maritime conventions are issued by the International Maritime Organization (IMO). To provide more detailed application of the conventions, the IMO issues conventions such as SOLAS, STCW, MARPOL. The IMO has no direct enforcement powers, rather this is typically enforced by authorities in the member countries following local ratification of the conventions. The operations on the practical level are surveyed by specialized maritime classification agencies with the mandate of IMO and flag states. Currently the approved classification societies are members of International Association of Classification Societies (IACS) and globally recognized as guardians of the rules.
High levels of autonomy already defined today such as conditionally unmanned machinery spaces are typically not applied to vessels carrying passengers. We see that this will probably also be the case for periodically unmanned bridges. However, the technology used will greatly help any vessel operating with any levels of autonomy and manning.
The possibility to safely operate the vessel without direct, continuous and active supervision of the master, or the person who has the delegated responsibility, will likely require a fundamental revision of the legal system. In the first stages the change will probably affect some aspects of the construction of the bridge and the operations in open waters with clearly defined requirements for conditions to apply.
Jurisdiction
One of the central rules to understand is the jurisdiction of the states’ rights and obligations to regulate the maritime industry. The main body of rules is the UN convention from 1982 on the Law of the Seas (UNCLOS).
Bridge visibility
The International Convention for the Safety of Life at Sea (SOLAS) Ch. 5, req. 22, defines the required construction of the bridge. The most important aspect is the visibility outside the windows of the bridge. From the main conning position, the vessel must have 225 degrees visibility with a view of the sea surface not “obscured by more than two ship lengths, or 500 m, whichever is the less, forward of the bow to 10° on either side under all conditions of draught, trim and deck cargo. When going towards unmanned bridges, these requirements needs to be met by a virtual line of sight.
Competence in watchkeeping
STCW defines conditions for the required crew on bridge and in what conditions the status is accepted. The principles of the typical crew on the bridge and the operating conditions are described below.
Bridge status | Required crew on bridge | Conditions |
B3 | OOW, lookout, helmsman | Special conditions |
B2 | OOW, lookout | Night, good conditions |
B1 | OOW | Day, good conditions |
The B0 concept outlines the general conditions on when it could be possible to enable transferring the monitoring responsibility from the OOW to a machine for a certain period of time.
In order to maintain the command hierarchy, B0 needs to be linked to the engine room status. OOW/Captain is legally responsible for the ship, and in case Unmanned Engine Control Room status is lost, he/she needs to take the decision on when it is safe to revert back to E0 and B0. Therefore, E0 or UMS notation is linked to B0. When the engine room has the E0 status, there needs to be alarm system in place to provide alarms for the bridge and the chief engineer. As part of the risk management of B0, smart filtration of alarms with regards to propulsion or escalation of unanswered alarms, will need to apply.

Conditions for B0
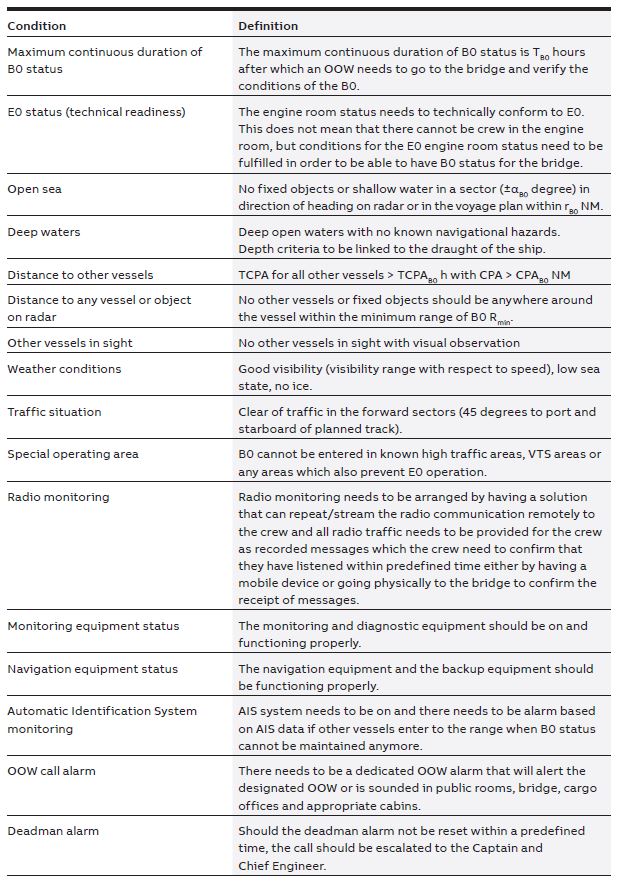
General conditions for B0
The general conditions for B0 are described in the table below. The principle is that the weather conditions are good, visibility clear, technical status should correspond to E0/ UMS, no fixed objects visible in the forward sector nor any vessels visible with a CPA and TCPA below certain values. In addition, there should be no radio traffic. If these conditions apply, the OOW work in B1 situations nowadays is to monitor the radar, look outside the window and make sure that nothing is to be done. It is proposed that during these situations the OOW could leave the bridge unmanned.
Distance and time considerations
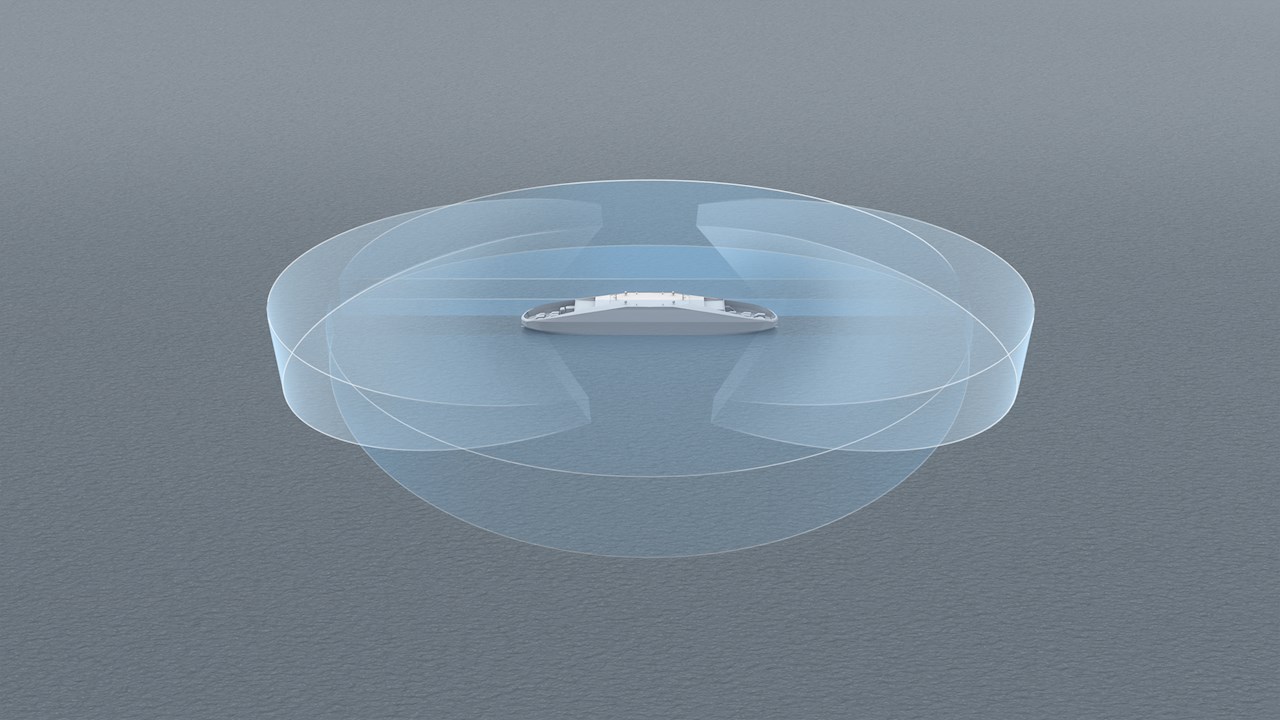
The conditions for B0 are heavily dependent on range with respect to distance and time. How far are the other ships? When considering the B0 status, one needs to take into account not only the speed of the own vessel but that of the others as well.
In general, radar range can be considered to be up to 96 nautical miles. A target at this range will be reached in six hours and 24 minutes if the vessel is sailing at 15 knots. However, if the other vessel is also sailing at 15 knots, the time when the vessels meet naturally be half the time (three hours and 12 minutes).
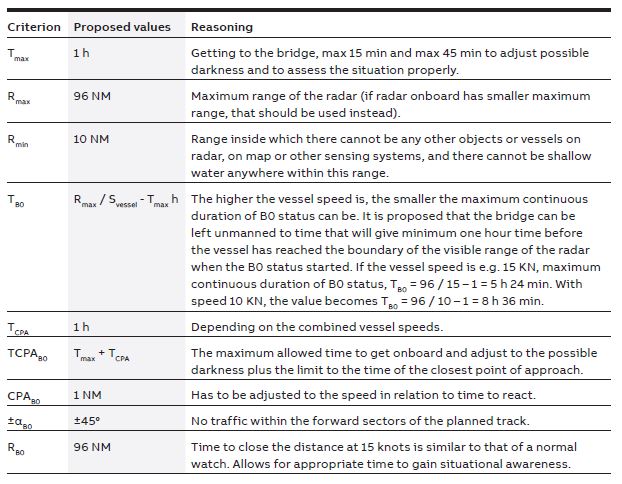
There are several ways to define the criteria. For example, one can use fixed values for each criterion or those can be made dynamic to be based on vessel Svessel, maximum allowed reaction time Tmax. The maneuvering capabilities of the vessels can be factored in also.
The table below presents proposed values for the B0 conditions and explains the reasoning behind those values.
Using B0
When entering the B0 status, the OOW needs to ensure that the navigation equipment, monitoring systems and alarm systems deployed to automatically call the OOW to the bridge are all in order. Therefore, at a minimum, the following tests and activities need to be performed:
-Test procedures for navigation equipment
-Checklist of critical operations and functionalities
-Check the alarms and related internal shipboard connectivity
-Check that B0 conditions hold and there are no vessels or fixed objects in radar or in the voyage plan within the B0 range RB0
-Record the event, checklist and conditions of entering to the B0 status on the ship logbook
Alarm hierarchy
In case there is an alarm that will cause the loss of the E0 status, an engineer and an OOW will be alerted to return to their respective places of duty. That will cause the loss of the B0 status. The principle is that the engine room alarm, which causes the loss of the E0 status, will always cause a need for the OOW to return to the bridge. Depending on the severity of the alarm, the Captain might be called as well. Therefore, the alarm hierarchy related to engine room alarms is as follows:
E0 status alarm engineer - OOW - Captain.
In case there is an alarm which causes the loss of the B0 status, the OOW will be commanded on duty. That will not cause loss of E0 status by default. Therefore the alarm hierarchy related to bridge alarms is as follows:
B0 status alarm - OOW - Captain.
When the B0 status is deactivated due to the B0 status alarm, the OOW will decide if there is a need to call the Captain to the bridge and possibly the duty engineer to the engine room. However, in case of the E0 status remaining unchanged, the B0 status alarm will not automatically cause the loss of the E0 status.
Requirements for technology
In order to maintain the B0 status, the B0 conditions need to be monitored by means of technology. There should be at least two independent means for all measurement and situational awareness technologies.
Monitoring and diagnostics of all navigation sensors and equipment
In order to leave the bridge unmanned for a period of time, monitoring and diagnostic equipment for critical equipment such as navigation equipment is required. Currently this is an OOW task, but in a B0 situation, there needs to be a system which can monitor the status of the navigation equipment, such as the error of gyrocompass, radar performance or stability of the GNSS.
Provide equivalency to lookout by means of technology
Regulations require people to look out the window due to the fact that for safe operation, one cannot rely on the radar only. The basis for the B0 bridge is to provide continuous visibility from the bridge with cameras and possibly other sensors which offer an equivalent field of view to an unaided human eye. It is also vital to state the requirement to always have two independent sources of information supporting the machine line of sight maintaining the B0 watch. Such technology could also alleviate the challenges of night-time operations. Additional infrared technologies (cameras and lights) can be deployed by either having night cameras operating on infrared wavelengths as well as appropriate infrared lights, or recognizing other traffic based on lights and normal daytime cameras.
If no human operator is maintaining a lookout, an automated target identification and classification needs to be deployed to provide equivalency to the SOLAS Ch. 5, req. 2. ABB is already deploying a technology that combines camera and sensor data to produce an algorithm which performs classification of the targets – currently alongside bridge staff.
There would also be a need to have system in place that would recognize and identify land from camera data and continuously monitor it from the video stream. If land is seen on the horizon in the forward sector, the B0 condition needs to be terminated.
Another condition would be having an arrangement of audio microphones at the bridge and outside the vessel to provide means to sense audible signals, as well as an analysis solution that would be able to distinguish exceptional noise from the environment.
Clear sectors
In order to keep the B0 status, one needs to monitor that there are no other vessels or any fixed obstacles within RB0 NM on the voyage plan or the radar, no other vessels of which TCPA and CPA values are above the conditions of B0. In addition, there is a minimum safety distance inside which there should be nothing on any sensor system or on the nautical chart. There needs to be at least two independent means of monitoring of the B0 range to make sure that there is no other traffic which would end the B0 status.
This requirement could be met by monitoring the radar to ensure CPA & TCPA values remain above B0 prerequisites, potential AIS analysis and assessment of the electronic charts. Together these data sources currently inform the OOW and bridge team of their real time situation.
Automatic recording and confirmation of reception of radio messages
Usage of machine learning to manage situations where no radio watch is kept could stream the critical messages directly to the OOW with a confirmation and acknowledgment via the bridge or a mobile device.
Portable, mobile or remote monitoring on board
The OOW needs to have immediate access to the navigation, radar, camera and other relevant sensor data during B0 status, in at least a similar method as current E0 or UMS systems inform the engineers today of the alarm that is triggered.
Conclusions
B0 is a complex concept from a number of standpoints, including regulatory. However, the industry is now at a point where (according to BIMCO) the pipeline of competent seafarers is decreasing and technology is maturing rapidly. Yet the safety of our crews, cargo and ships still remains paramount as it has for millennia. It is our intent to provide solutions to the current and near future fleet where technology is used alongside competent officers to improve decision making with a timely assessment.
The nature of today’s vessel operation still requires humans on board, even as we see an increasing number of ships being more electric, eigital and connected than ever before.